 |
 |
 |
Errors during motor performance can have painful consequences. However, not all motor errors are as dramatic as shown above. In most everyday activities we constantly make small, hardly noticeable errors, for example when we are running down stairs and slightly misestimate the height of a step. These small errors are important because our motor system uses them immediately on the next step to adjust the motor output. But how does this error-based learning work? |
A model of error-based learning
|
Error-based learning, or adaptation, can be observed for a wide variety of motor behaviors. We adapt reaching movements, dart throwing and walking when we wear prisms that shift the visual world by a few degrees (Martin et al., 1996). After the prisms are taken off, we show after effects in that we make errors in the opposite direction; the brain has to adapt back to the natural state. We can also adapt to novel forces that are applied to the arm during reaching using a robotic device (Shadmehr and Mussa-Ivaldi, 1995). Ballistic eye movements (saccades) adapted when the target is systematically displaced during the saccade (Wallman and Fuchs, 1999). Even for complex skills like bimanual object manipulation can adaptation we observed (Diedrichsen et al, 2005a). |
|
|
Recently, a class of models has been developed that captures how people learn from errors. In these model, the motor output on trial n is determined by an internal state zn. The correct motor output on trial n is un, a variable that depends on the environment. The observed error during motor performance, yn, is the difference between the actual motor output and the desired motor output plus some trial-by-trial noise (en). |
|
|
|
How does the brain learn? A very simple linear learning rule has been shown to characterize human learning quite well. The learning rule states: Change the state that produced the last movement (zn) by a fraction of the error (un-zn) that you experienced during that movement. The fraction of the error by which the behavior is changed is B, the learning rate . |
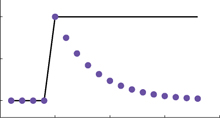 |
For example, we might reach straight in the beginning of the experiment (z=0). When we suddenly put on prism glasses, so that we should reach 10 degrees to the right (u=+10, black line), we will first make an error (u-z) of ca. 10 degrees (cyan dots). By using the above learning rule, the error is decreased by fraction B on every trial, resulting in a approximately exponential learning curve. |
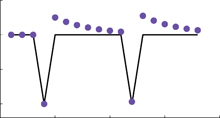 |
A different example. Say you walk down a flight of stairs that has a few steps that are smaller than the others. On these steps your stride will be to long; you will experience an error. After these events, the step size will be slightly shorter for a few trials and only slowly go back to the old value. Indeed, such reaction to "catch trials" can be seen in human performance (Thoroughman & Shadmehr, 2000; Diedrichsen et al. 2005a). |
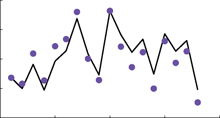 |
Finally, the model predicts that the system should also learn when the correct motor behavior u and therefore the errors u-z are completely random. Learning under these circumstances can be only observed by studying how each movement depends on the errors that just preceded the movement. By fitting a simple linear model to human data, Donchin et al. (2003) could show that learning goes on even when the desire behavior changes randomly on each trial. The learning rate B under these circumstances is similar to those observed in the two conditions above. Our motor system keeps adaptating at the same rate, even if we consciously know that everything is random! |
Neural correlates of reach errors
If motor errors are the signal that leads to learning, then we reasoned that all areas of the brain that learn from these motor errors should be more activated when these errors occur. But how could we distinguish activity related to the error correction and the learning from the errors?
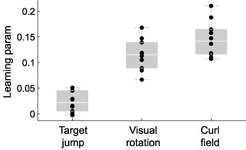
It turns out that we do not learn from all kinds of errors. The figure to the left contrasts three type of errors that we can induce when a person makes a reach from one location (bottom square) to another one (top square):
|
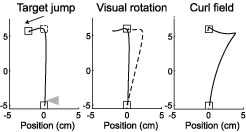 |
All of these are errors result in similar error correction. But when all perturbation are random, the brain only "learns" from errors induced by a visual rotation or a curl field, not from errors induced by target jumps. To show this, we estimated learning rates (see above) from the subject's behavior when exposed to random perturbations. Only when the motor system interpreted that it had done something wrong, did participants learn. When the error was caused by an external event (a target jump), the motor system did not learn. Note, however, that all subjects knew consciously that they are being perturbed by the robot and that these perturbations were random. |
 |
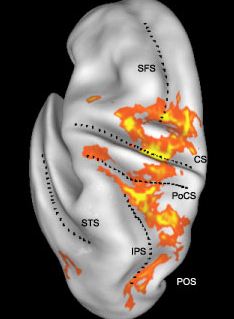
Movement related activity can be seen in bilateral premotor cortex, left motor and sensory cortex, and bilateral parietal cortex. All errors led to more activity in this motor circuitry - not surprisingly, because errors lead to correction which leads to more movement! |
 |
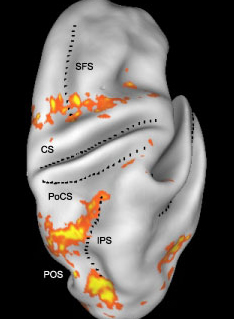 |
However, the interesting result becomes clear when one compares which areas show more activity during visual rotations errors (blue) and which areas show more activity during target jump errors, when the online corrections are the same. Posterior parietal regions are more active when we have to changed to target of our reach. Anterior parietal areas respond more when something about our movements went wrong and when our motor system learns from the errors. Is this the site were learning occurs? |
 |
 |
Error-based learning depends on the cerebellum
Studies with patients that have lesions in the cerebellum has provide very clear evidence that the cerebellum is necessary for error-driven plasticity. Humans and monkeys with cerebellar lesions are severely impaired in
- adaptation of dart throwing movements to prisms and do not show an aftereffect (Martin et al. 1996).
- adaptation to different walking speeds on a treadmill (Morton et al. 2006).
- adaptation to novel force fields during reaching (Smith and Shadmehr, 2005).
- adaptation to new object dynamics during bimanual coordination (Diedrichsen et al, 2005a).
- adaptation to changes in saccadic gain (Baizer et al, 1999).
- ...
References
- Baizer JS, Kralj-Hans I, Glickstein M (1999) Cerebellar lesions and prism adaptation in macaque monkeys. J Neurophysiol 81:1960-1965.
- Diedrichsen J, Verstynen T, Lehman SL, Ivry RB (2005) Cerebellar involvement in anticipating the consequences of self-produced actions during bimanual movements. J Neurophysiol 93:801-812.
- Diedrichsen J, Hashambhoy YL, Rane T, Shadmehr R (2005) Neural correlates of reach errors. J Neurosci 25:9919-9931.
- Donchin O, Francis JT, Shadmehr R (2003) Quantifying generalization from trial-by-trial behavior of adaptive systems that learn with basis functions: theory and experiments in human motor control. J Neurosci 23:9032-9045.
- Martin TA, Keating JG, Goodkin HP, Bastian AJ, Thach WT (1996) Throwing while looking through prisms: I. Focal olivocerebellar lesions impair adaptation. Brain 119:1183-1198.
- Morton SM, Bastian AJ (2006) Cerebellar contributions to locomotor adaptations during splitbelt treadmill walking. J Neurosci 26:9107-9116.
- Smith MA, Shadmehr R (2005) Intact ability to learn internal models of arm dynamics in Huntington's disease but not cerebellar degeneration. J Neurophysiol 93:2809-2821.
- Thoroughman KA, Shadmehr R (2000) Learning of action through adaptive combination of motor primitives. Nature 407:742-747.
- Wallman J, Fuchs AF (1998) Saccadic gain modification: visual error drives motor adaptation. J Neurophysiol 80:2405-2416.